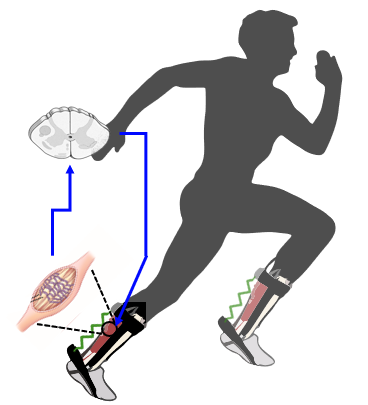
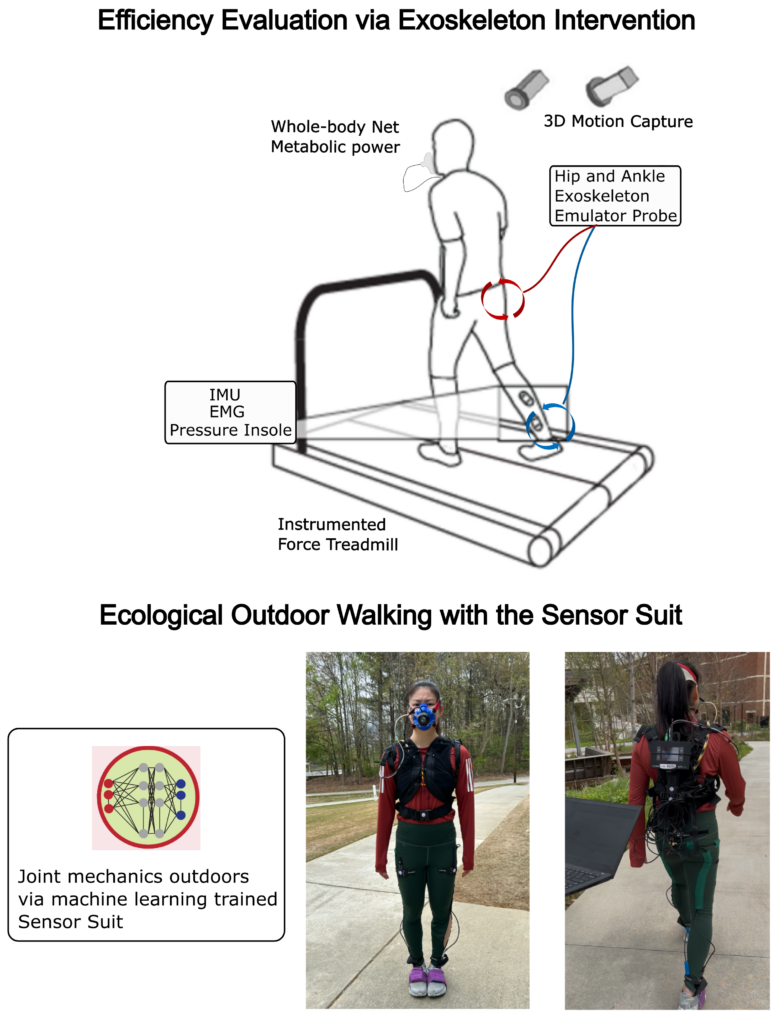
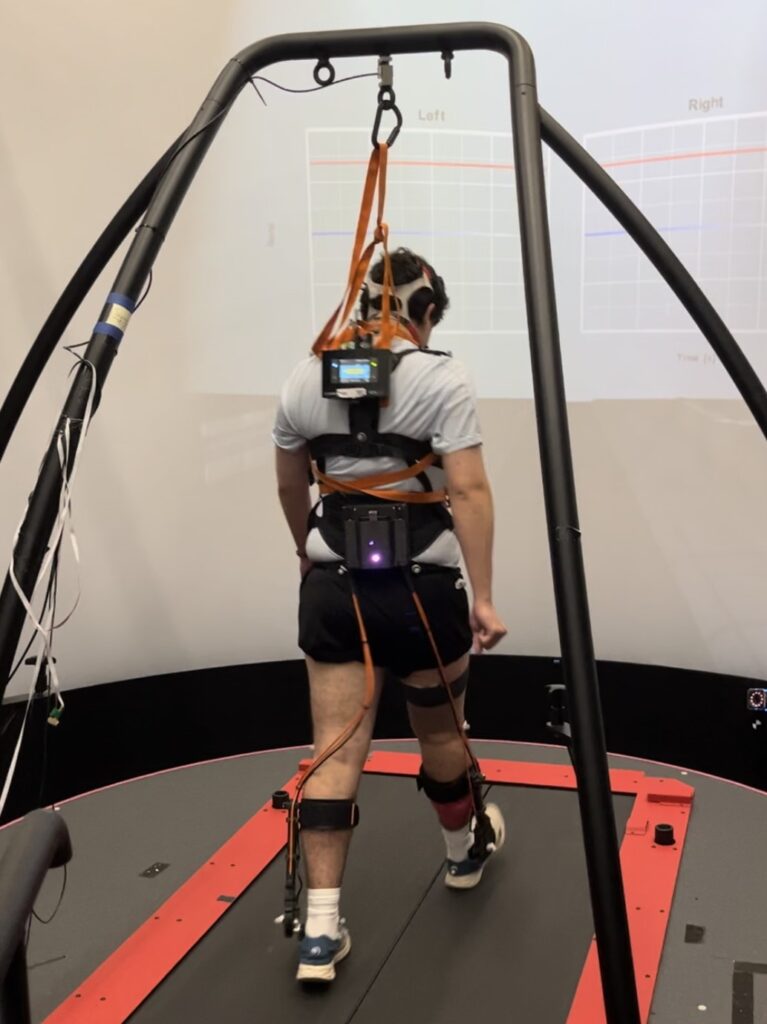
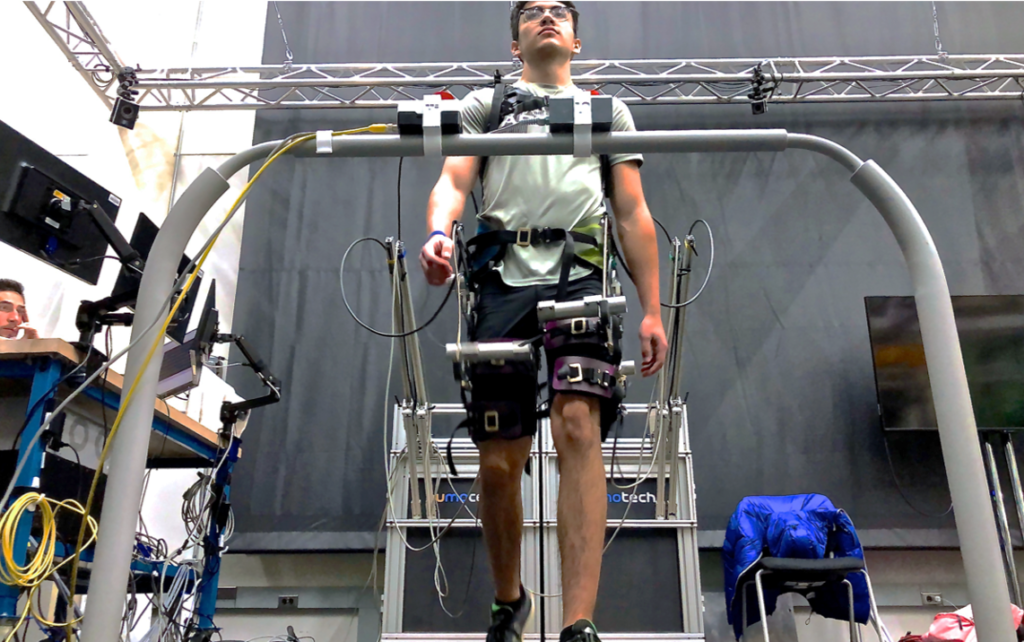
In our lab, we think about how engineered wearable devices – such as lower-limb exoskeletons – interact with human physiology across musculoskeletal scales. This involves integrating knowledge about structure and function of whole-limbs, lower-limb joints, and individual muscle-tendon units. We often use simple musculoskeletal models to develop questions and test hypotheses, then design experiments to investigate how these ideas translate to human locomotion in ‘real-world’ contexts. We are particularly interested in finding ways to modulate multi-scale neuromechanics – from whole-body down to the individual muscles – in order to improve stability, agility, and economy of human locomotion.